TAROS 2017 poster paper presentation
 TAROS 2017 poster paper
TAROS 2017 poster paperIntroduction
After TAROS 2017, I can honestly say that small conferences like this one are very much enjoyable academic spaces to gather a specific community around a topic, in this case robotics. Most of the UK robotics community, including industry, senior researchers and early researchers like myself can meet, show their work and discuss current and future challenges and cooperation possibilities.
The quality of the work presented was of great quality and the conference itself was very well organized, I congratulate University of Surrey and Prof. Yang Gao and her team for all the hard work.
My recommendation to any roboticist interested in knowing the UK robotics community and to publish their work in a well reviewed event, to please do participate in next TAROS events ( TAROS 2018 in Bristol 😄 )


Both Stefan Schubert and James O’Keeffe’s papers (from left to right in the photo) are of excellent quality and very interesting to read, highly recommended.
More photos are available from this link.
Presented Work
I went to TAROS 2017 to present my work from the initial results of my PhD, nominated for best poster prize with title Drivers’ Manoeuvre Classification for Safe HRI.
Poster
A version of the presented poster can be found in zenodo, accessible using this badge:
![]()
Presentation
A small 5 minute presentation was given to explain the posters content.
Videos
These videos explain the initial results we got.
Data was gathered from test subjects whilst driving with the KinectV2 and matched it with the driver input (e.g. steering wheel angle, gas, pedal, clotch and gear).
At the end, manoeuvres transitions were modeled and managed to classify them in realtime.
Dataset
The used dataset can be found in zenodo, accesible by the badge:
![]()
Published Version
Published paper is available here.
Citation
Citation can be obtained from springer directly, but here is a BibTeX entry:
@Inbook{LopezPulgarin2017,
author="Lopez Pulgarin, Erwin Jose
and Herrmann, Guido
and Leonards, Ute",
editor="Gao, Yang
and Fallah, Saber
and Jin, Yaochu
and Lekakou, Constantina",
title="Drivers' Manoeuvre Classification for Safe HRI",
bookTitle="Towards Autonomous Robotic Systems: 18th Annual Conference, TAROS 2017, Guildford, UK, July 19--21, 2017, Proceedings",
year="2017",
publisher="Springer International Publishing",
address="Cham",
pages="475--483",
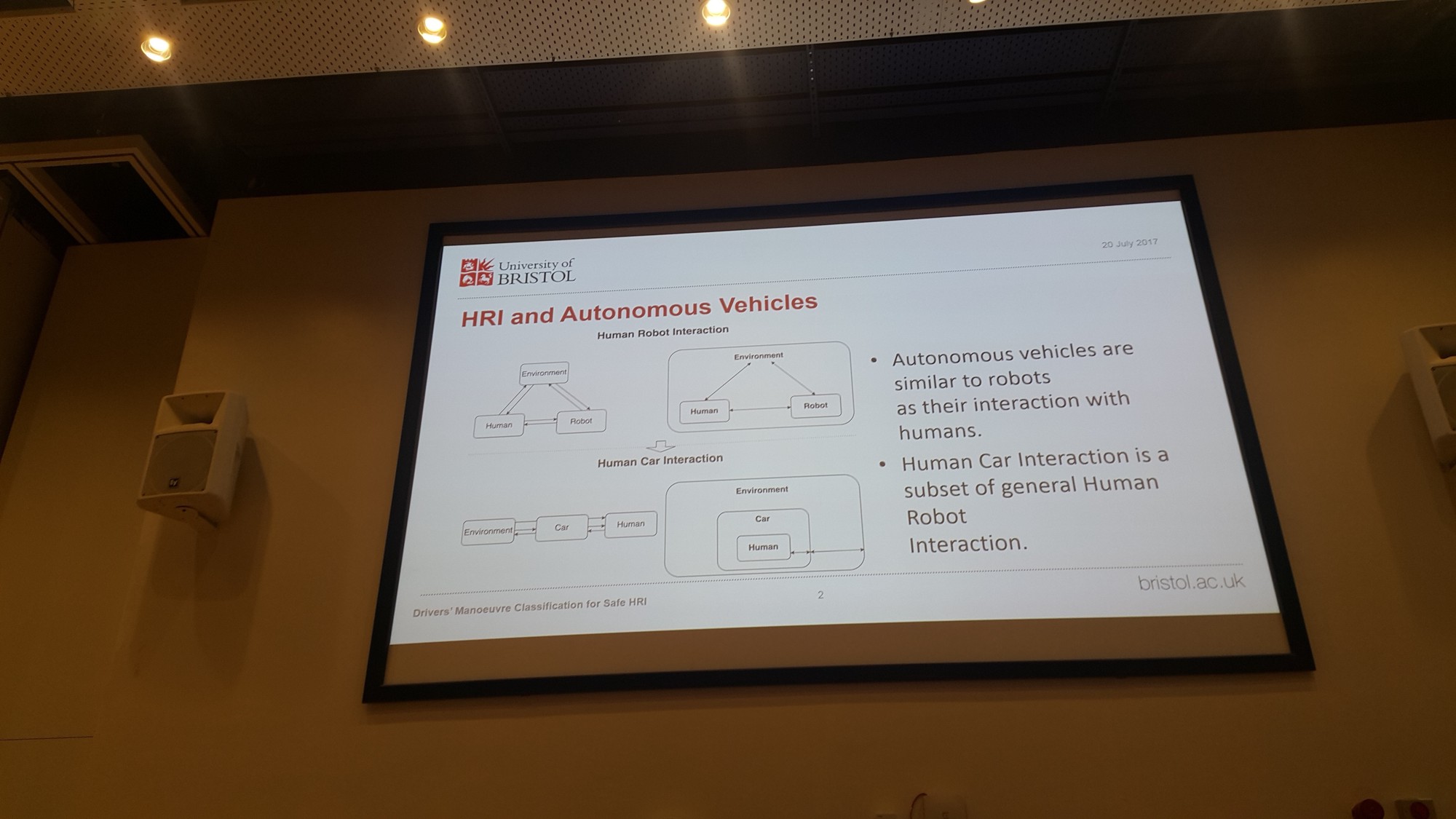
abstract="Ever increasing autonomy of machines and the need to interact with them creates challenges to ensure safe operation. Recent technical and commercial interest in increasing autonomy of vehicles has led to the integration of more sensors and actuators inside the vehicle, making them more like robots. For interaction with semi-autonomous cars, the use of these sensors could help to create new safety mechanisms. This work explores the concept of using motion tracking (i.e. skeletal tracking) data gathered from the driver whilst driving to learn to classify the manoeuvre being performed. A kernel-based classifier is trained with empirically selected features based on data gathered from a Kinect V2 sensor in a controlled environment. This method shows that skeletal tracking data can be used in a driving scenario to classify manoeuvres and sets a background for further work.",
isbn="978-3-319-64107-2",
doi="10.1007/978-3-319-64107-2_37",
url="https://doi.org/10.1007/978-3-319-64107-2_37"
}
Erwin Lopez
Research Associate in Perception, Decision and Actions for HRI
My research interests include control, robotics, HRI and embedded systems.